Evolutionary Robotics

-
Our approach:
-
-
- On-line and on-body: individuals learn, i.e. evolve their individual controllers
-
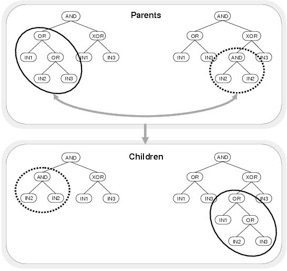
- “Real” mating: new morphologies derived from crossing over
-
- Newborns shall learn...
-
-how to move
-
-to find energy sources
-
-to find mates
...before being released into the world
-
-
- Open-ended evolution: robots just have to survive in a closed ecosystem
-
-but environment can be tailored to drive evolution towards desired behaviors
-
-energy is limited
-
-mates are not chosen at random, individuals decide wether to mate depending on their relative skills
-
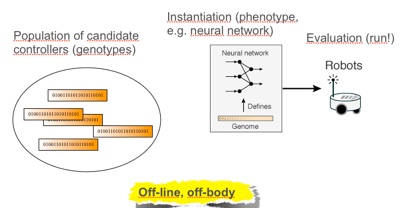
Evolutionary Robotics -on the controllers side- deals with the automatic generation or adaptation of controllers for mobile robots. Traditionally, this has been done "off-line and off-body"
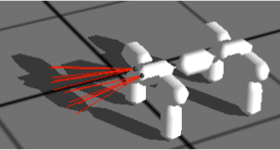
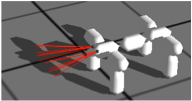
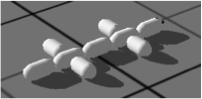
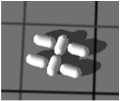
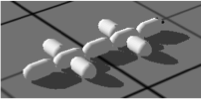
Modules:
-6 connection points (front, rear, left, right, top, bottom), 2DOF
-Head: 2 range sensors
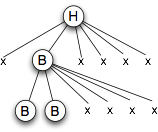
Encoding: tree

-
Phase 1: Learning by evolving controllers for modular robots


-
Phase 2: Morphology crossover (in progress)