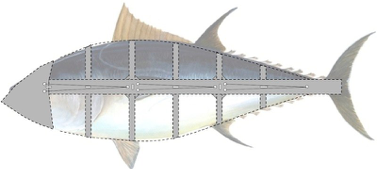
iTuna V1

Actuators technology in robotics is basically centered on by two kind of actuators: electric motors/servomotors and pneumatic/hydraulic actuators. In mobile robotics, the former is mostly used, with exceptions being e.g. large legged robots. The (rotatory) motion of the motors is transmitted to the effectors through gearboxes, bearings, belts and other mechanical devices in the case that linear actuation is needed. Although applied with success in uncountable robotic devices, such systems can be complex, heavy and bulky.
In underwater robots, propellers are most used for locomotion an maneuvering. Propellers however may have problems of cavitation, noise, efficiency, can get tangled with vegetation and other objects and can be dangerous for sea life.
Underwater creatures are capable of high performance movements in water. Thus, underwater robot design based on the mechanism of fish locomotion appears to be a promising approach.
Name: iTuna
Version: 1.0
Birthday: January 2010
College: UPM
Pages



Why fishes?