Publications of C. Rossi


(Inverse time order)
Journal Papers
47. E. A. Parra Ricaurte, J. M. Muñoz-Guijosa, K. Melo, S. Dominguez, C. Rossi,
Dynamic Model of a Compliant Quadruped Trunk Under Large Deformations
J. Bionic Engineering (to appear, 2026).
46. M. Dominguez, S. Mishra, R. Suarez, Z. Milosevic, C.Rossi, S. Dominguez,
CNN-based Vessel Tracking in Infrared Images with an Unmanned Wing-in-ground Vehicle
IEEE Access (to appear, 2026).
45. M. Roman Ruiz, C.Rossi,
Optimising Convolutional Neural Network Architectures for Fin Whale Pulse Detection in Spectrograms
Applied Sciences, 2026 16(5), 2345.
44. E. Aguado, V. Gomez, M. Hernando, C. Rossi, R. Sanz,
Operational Model for System Dependability: the ROBOMINERS Use-Case
Journal of Intelligent & Robotics Systems, Vol. 112, No. 1, 2026. 44.
43. M. Roman Ruiz, S. Dominguez, C.Rossi,
Automated Detection of 20 Hz Fin Whale Calls Using Computer Vision Techniques
Ecological Informatics, Vol.27, Dec. 2025, 103499.
42. E. Aguado, V. Gomez, M. Hernando, C. Rossi, R. Sanz,
A survey of Ontology-Enabled Processes for Dependable Robot Autonomy,
Frontiers in Robotics and AI, Vol. 11, 2024.
41. V. Gomez, W. Remmas, M. Hernando, A. Ristolainen, C. Rossi,
Bioinspired Whisker Sensors for 3D Mapping of Underground Mining.
Biomimetics 9(2), 83 (2024).
40. V. Gomez, E. Aguado, M. Hernando, R. Sanz, C. Rossi,
Design and Kinematic Modeling of a Soft Continuum Telescopic Arm for Self-assembly Mechanism for a Modular Robot.
Soft Robotics 11:2 (2023).
39. M. Roman Ruiz, C.Rossi, J.A. Esteban,
Fin Whale pulse detection with deep neural networks
Ecological Informatics, 77, 1022434 (2023).
38. Virgilio Gomez, Miguel Hernando, Esther Aguado, Ricardo Sanz and Claudio Rossi
ROBOMINER: Development of a Highly Configurable and Modular Scaled-Down Prototype of a Mining Robot
Machines 2023, 11(8), 809.
37. E. Aguado, C. Rossi, P. Gil,
Codifying wildness: wild behaviour for improving human-robot interaction,
International Journal of Social Robotics, 15, pp. 825–834 (2023).
36. C. Rossi, A. Caro Zapata, Z., R. Surez and S. Dominguez,
Topological Navigation for Autonomous Underwater Vehicles in Confined Semi-Structured Environments,
Sensors 2023, 23(5), 2371.
35. W. Coral, C. Rossi,
Soft dorsal/anal fins pairs for roll and yaw motion in robotic fish,
Bioinspir. Biomim. 18:1, 18 016008 (2022).
34. E. A. Parra Ricaurte, J. Pareja, S. Dominguez, C. Rossi,
Comparison of leg dynamic models for quadrupedal robots with compliant backbone,
Nature Scientific Reports volume 12, Article number: 14579 (2022). (available here)
33. D. Patria, C. Rossi, R. A. Suarez Fernandez and S. Dominguez,
Nonlinear Control Strategies for an Autonomous Wing-In-Ground-Effect Vehicle,
Sensors 2021, 21(12), 4193; https://doi.org/10.3390/s2112419, Jun 2021.
32. F. Cabrera, M. Arellano, S. Granizo, F. Santacruz, C. Rossi,
"Bioinspired Fish Robot, Stability Control Trough the Dorsal Fin",
Journal of Theoretical and Applied Information Technology, to appear, 2021.
31. E. Aguado, Z. Milosevic, C. Hernández, R.Sanz, M. Garzon, D. Bozhinoski, C. Rossi,
"Functional Self-Awareness and Metacontrol for Underwater Robot Autonomy",
Sensors 21(4), 2021.
30. Zorana Milosevic, Ramon A. Suarez Fernandez, Sergio Dominguez and Claudio Rossi,
"Guidance for Autonomous Underwater Vehicles in Confined Semistructured Environments",
Sensors 2020, 20(24), 7237.
29. L. Lopes et al.,
"ROBOMINERS – Developing a bio-inspired modular robot-miner for difficult to access mineral deposits",
Advances in Geosciences 54(54):99-108.
28. F. Cabrera, C. Rossi, D. Noboa,
"Dorsal Fin Interaction Analysis of a Bioinspired Surfperche Robot" ,
Journal of Theoretical and Applied Information Technology, September 2020.
27. R. A. Suarez Fernandez, Z. Milosevic, S. Dominguez, C. Rossi,
"Motion Control of Underwater Mine Explorer Robot UX-1: Field Trials" ,
IEEE Access, Vol 9, pp. 99782-99803, July 2019 .
26. R. A. Suarez Fernandez, E. Andres Parra, Z. Milosevic, S. Dominguez, C. Rossi,
"Nonlinear Attitude Control of a Spherical Underwater Vehicle",
Sensors 19(6), 2019.
25. R. A. Suarez Fernandez, D. Grande, A. Martins, L. Bascetta S. Dominguez, C. Rossi,
"Modelling and Control of Underwater Mine Explorer Robot UX-1",
IEEE Access 7:1,pp. 39432-39447, 2019.
24. Zhang, Chao; Rossi, Claudio,
"Effects of elastic hinges on input torque requirements for a motorized indirect-driven flapping-wing compliant transmission mechanism",
IEEE Access Vol 7, pp.10368-13077, 2019.
23. F.R. Cabrera, F.J. Santacruz, D.F. Veloz, C. Rossi,
"Bio-inspired fish robot with body and caudal fin locomotion operated remotely using bluetooth technology",
Investigar, pp. 18-24, June 2018.
22. Coral, William; Rossi, Claudio; Curet, Oscar; Castro, Diego,
"Design and assessment of a flexible fish robot actuated by shape memory alloys",
Bioinspir. Biomim. (Vol. 13, Number 5, 2018).
21. Zhang, Chao; Rossi, Claudio,
"A review of compliant transmission mechanisms for bio-inspired flapping-wing micro air vehicles",
Bioinspir. Biomim. (Volume 12, Number 2, 2017).
20. A. Ravalli, C. Rossi, G. Marrazza,
"Bio-inspired fish robot based on chemical sensors",
Sensors & Actuators: B. Chemical, Volume 239, February 2017.
19. William Coral, Claudio Rossi, and Oscar M Curet,
"Free Vibration Analysis of a Robotic Fish based on a Continuous and Non-uniform Flexible Backbone with Distributed Masses",
The European Physical Journal Special Topics 24:17-18, 2015.
18. Colorado J., Rossi C. , Chao Z. and Barrientos A,
"Towards efficient flight: insights on proper morphing-wing modulation in a bat-like robot",
Advanced Robotics, 2015, DOI: 10.1080/01691864.2015.1082501.
17. Jose Baca, Prithvi Pagala, Claudio Rossi, Manuel Ferre,
"Modular robot systems towards the execution of cooperative tasks in large facilities",
Robotics and Autonomous Systems Volume 66, Pages 159-174, 2015.
16. Claudio Rossi, Antonio Barrientos, Leyre Aldama,
"Simultaneous Task Subdivision and Allocation using Negotiations in Multi-robot Systems".
International Journal of Advanced Robotic Systems, 2015. (12:16, doi: 10.5772/59880).
15. C. Rossi, A.E. Eiben,
"Simultaneous versus Incremental Learning of Multiple Skills by Modular Robots".
Evolutionary Intelligence, Volume 7, Issue 2, 2014.
14. D. Sanz, A. Barrientos, M. Garzon, C. Rossi et al.,
"Wireless Sensor Networks for Planetary Exploration: Experimental Assessment of Communication and Deployment"
Advances in Space Research (DOI: 10.1016/j.asr.2013.06.007), 2013.
13. J. Colorado, C. Rossi, A. Barrientos,
"Inertial attitude control of a bat-like morphing-wing micro air vehicle",
Bioinspir. Biomim. 8(1): 016001, 2013.
12. A.Barrientos, M.Alvarez, J.D.Hernandez, J.del Cerro, C.Rossi,
"Modelado de Cadenas Cinematicas mediante Matrices de Desplazamiento. Una alternativa al método de Denavit-Hartenberg" (Modeling of kinematic chains by Displacement Matrices. A comprehensive alternative to Denavit-Hartenberg method),
RIAI - Revista Iberoamericana de Automatica e Informatica Industrial, Elsevier (2012).
11. J. Colorado, A. Barrientos, C. Rossi, J. Bahlman, K. Breuer,
"Biomechanics of smart wings in a bat robot: morphing-wings using SMA actuators",
Bioinspir. Biomim. 7(3):036006, 2012.
10. F.A.W. Belo, A. Birk, C. Brunskill, F. Kirchner, V. Lappas, C.D. Remy, S. Roccella, C. Rossi, A. Tikanmaki, G. Visentin,
"The ESA Lunar Robotics Challenge: Simulating Operations at the Lunar South Pole",
Journal of Field Robotics, 2012. (DOI: 10.1002/rob.20429).
9. Claudio Rossi, Julian Colorado, William Coral, Antonio Barrientos,
"Bending Continuous Structures with SMAs: a Novel Robotic Fish Design",
Bioinspir. Biomim. 6 (2011) 045005.
8. A. Barrientos, J. Colorado, J. del Cerro, A. Martinez, C. Rossi, D. Sanz and J. Valente,
"Aerial Remote Sensing in Agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots",
Journal of Field Robotics, 28:5, pp. 667-689, 2011.
7. J. Colorado, A. Barrientos, C. Rossi,
"Musculos Inteligentes en Robots Biologicamente Inspirados: Modelado, Control y Actuación. (Bio-inspired robots with smart muscles: Modeling, Control and Actuation)",
RIAI - Revista Iberoamericana de Automatica e Informatica Industrial, Elsevier Vol 8 No 4, 2011.
6. J. Valente, D. Sanz, A. Barrientos, J. Del Cerro, A. Ribeiro, C. Rossi,
"An Air-Ground Wireless Sensor Network for Crops Monitoring",
Sensors 11(6) (Special issue on Sensors in Agriculture and Forestry), pp. 6088-6108, 2011.
5. C. Rossi, M. Abderrahim, J.C. Diaz,
"Tracking moving optima using Kalman-based predictions",
Evolutionary Computation, MIT Press, Vol. 16, Nr. 1, 2008.
4. C. Rossi, M. Abderrahim, J.C. Diaz,
"Pose estimation for Variable Configuration Objects: an Evolutionary Approach to Vision-based Navigation and Inspection",
WSEAS Transactions on Information Science and Applications, Vol. 3, Nr. 3, pp. 538-545, 2006.
3. A. Carrascal, D. Manrique, J. Rios, C. Rossi,
"Evolutionary Local Search of Fuzzy Rules through a novel Neuro-Fuzzy encoding method",
Evolutionary Computation, MIT Press, Vol. 11, Nr. 4, pp. 436-461, 2003.
2. J. Gottlieb, E. Marchiori, C. Rossi,
"Evolutionary Algorithms for the Satisfiability Problem",
Evolutionary Computation, MIT Press, Vol. 10, Nr. 1, pp. 35-50, 2002.
1. I.M. Bomze, M. Budinich, M. Pelillo, C. Rossi
"Annealed Replication: A New Heuristic for the Maximum Clique Problem"
Discrete Applied Mathematics, Elsevier, Vol. 121, pp. 27-49, 2002.
Book Chapters
6. E.A. Parra, S. Dominguez, C. Rossi,
Low Energy Consumption Quadrupedal Locomotion with Quasi-Resonant Compliant Backbone,
Springer Lecture Notes in Electrical Engineering book series (LNEE), 2021.
5. William Coral, Claudio Rossi, Julian Colorado, Daniel Lemus and Antonio Barrientos
"SMA-Based Muscle-Like Actuation in Biologically Inspired Robots: A State of the Art Review"
In G. Berselli, R. Vertechy and G. Vassura (eds.) Smart actuation and sensing systems / Recent advances and future challenges, InTech Open, 2012 ISBN: 979-953-307-990-4.
Available here.
4. Rossi C, Coral W, Barrientos A
"Robotic fish to lead the school"
In Palstra AP and Planas JV (eds.) Swimming Physiology of Fish: Towards using exercise for farming a fit fish in sustainable aquaculture, Springer, 2012 ISBN 978-3-642-31048-5.
3. A. Barrientos, C. Rossi, R. San Martin
"Identification and Modelling of Flight Dynamics in Mini-Helicopters Using Neural Networks"
In A. Lazinicka, (Ed.) Intelligent Aerial Vehicles, (2008).
-
2.P. San Segundo, D. Rodriguez-Losada, C. Rossi
"Recent developments in bit-parallel algorithms"
In A. Lazinicka, (Ed.) "Tools for Artificial Intelligence", (2008).
1. I.M. Bomze, M. Budinich, M. Pelillo, C. Rossi
"A new 'annealed' heuristic for the maximum clique problem"
In P. M. Pardalos, (Ed.) "Approximation and Complexity in Numerical Optimization: Continuous and Discrete Problems", Kluwer Academic Publishers, ISBN 0792362756, pp. 78-95, 2000. (Abstract)
Conference Papers
2025
96. A. Galas et al., “Environmental impact assessment using a robot for underground mining ”, 9th Conference on Innovative Ideas of Young Scientists: Science-Startup_industry, Krakow, June 2025
2024
95. M.R. Ruiz, S. Dominguez, C. Rossi, Automated Detection of Cetaceans in Their Natural Habitats via R-CNN and Computer Vision Techniques, 2024 7th IEEE Iberian Robotics Conference (ROBOT 2024)
94. S. Ilić, Z. Milošević, R.A.S. Fernandez, C. Rossi, S. Domínguez, An LQG Approach to the Control of Unmanned Wing-In-Ground Vehicle, 2024 7th IEEE Iberian Robotics Conference (ROBOT 2024)
2023
93. E. SIlva et al., “TRIDENT - Technology based impact assessment tool for sustainable, transparent deep sea mining exploration and exploitation” OCEANS, Limerik, 2023
92. G Stasi, et al., ROBOMINERS: Developing Resilient Bio-Inspired Modular Robotic Miners for Sustainable Mining,
AGU Fall Meeting Abstracts 2023, SY34A-08
91. E Aguado, V Gómez, M Hernando, C Rossi, R Sanz, Category theory for autonomous robots: the marathon 2 use case, Iberian Robotics conference, 39-52
90. E Aguado, C Rossi, R Sanz, Sys-Self, Systems That Know What They Are (Doing), 9th Joint Ontology Workshops (JOWO 2023), 19-20 July, 2023, Sherbrooke, Québec, Canada
2022
89. Luis Lopes et al., “Robot-miners for a new mining future”, EGU General Assembly, Brussels, 2022
88. A. Kot-Niewiadomska, K. Galos, C.Rossi; "Modern mining technologies as a way to use conflict mineral deposits", Int. Conf. Mineral Deposits safeguard as a basis of mineral raw materials safety, Krakow , 2022.
87. E Aguado, R Sanz, C Rossi, Self-awareness for robust miner robot autonomy, EGU General Assembly Conference, EGU22-2716
86. Edgar Andres Parra Ricaurte, S Dominguez, C Rossi, Low Energy Consumption Quadrupedal Locomotion with Quasi-resonant Compliant Backbone, 17th International Conference, ICINCO 2022, Lieusaint-Paris, France, July 7–9, 2020
2021
85. Claudio Rossi; Fausto Cabrera; Joselyn Gallegos; Fernanda Gullsqui, "Performance Comparison of the Trajectory Execution Between 2 and 4 DOF Caudal Fin of a Fish Robot",16th IEEE Iberian Conference on Information Systems and Technologies (CISTI), Chaves, PT, June 2021
84. Aguado, Esther; Sanz, Ricardo; Rossi, Claudio, "Ontologies for run-time self-adaptation of mobile robotic systems" in XIX Conference of the Spanish Association for Artificial Intelligence (accepted, 2021)
83. Márcio Pinto et al., UNEXUP, a robotic exploration technology for underground flooded mines, European Geosciences Union (EGU) General Assembly (online, 2021)
82. Balazs Bodo et al., A new mining life for non-feasible mineral deposits? European Geosciences Union (EGU) General Assembly (online, 2021)
81. Zorana Milosevic et al., Software-in-the-loop and hardware-in-the-loop paradigms and their use for research and development of autonomous underwater vehicles, European Geosciences Union (EGU) General Assembly (online, 2021)
80. C Burlet, G Stasi, T Pinkse, C Rossi, The ROBOMINERS LIBS spectrometer: a mining sensor prototype for autonomous in-stream, in-slurry geochemical diagnostics, Geosciences Made in Belgium, 239
79. C Rossi, F Cabrera, J Gallegos, F Gullsqui, Performance Comparison of the Trajectory Execution Between 2 and 4 DOF Caudal Fin of a Fish Robot, 2021 16th Iberian Conference on Information Systems and Technologies (IEEE CISTI)
2020 and earlier
78. E.A. Parra, C. Rossi A Bio-inspired Quasi-Resonant Compliant Backbone for Energy Efficient Quadrupedal Locomotion, 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO) on-line, July 2020.
77. A. Suarez Fernandez, Davide Grande, Alfredo Martins, Luca Bascetta, Sergio Dominguez, Claudio Rossi, Variable Pitch System for the Underwater Explorer Robot UX-1, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
76. B Bodo, et al., ROBOMINERS-Resilient Bio-inspired Modular Robotic Miners, EGU General Assembly Conference Abstracts, 11727
75. M Pinto, et al., Making exploration of underground flooded mines a reality-the UNEXUP solution, EGU General Assembly Conference Abstracts, 13586
74. Ricardo Sanz, Julita Bermejo-Alonso, Claudio Rossi, Miguel Hernando, Koro Irusta and Esther Aguado, An Apology for the "Self" Concept in Autonomous Robot Ontologies, in Proc. ROBOT 2019, Porto, November 2019.
73. Carlos Hernandez Corbato, Zorana Milosevic, Carmen Olivares, Gonzalo Rodriguez and Claudio Rossi, Meta-control and self awareness for the UX-1 autonomous underwater robot, in Proc. ROBOT 2019, Porto, November 2019.
72. Claudio Rossi, William Coral and Julian Colorado, Motor-less and Gear-less Robots: New Technologies for Service and Personal Robots, Proceedings of ICINCO 2019, ISBN: 978-989-758-380-3, Prague, July 2019.
71. Zorana Milosevic, Ramon Suarez, Sergio Dominguez, Claudio Rossi, An Autonomous Underwater Explorer for Flooded Mines, 2019 International Mine Water Association Conference: "MINE WATER: Technological and Ecological Challenges", Perm, Russia, July 2018.
70. T. van de Velde, C. Rossi, A.E. Eiben, Body Symmetry in Morphologically Evolving Modular Robots, 22nd International Conference on the Applications of Evolutionary Computation (EvoApps, EVOSTAR 2019), Leipzig, Germany, 24-26 April 2019.
69. Ramon A. Suarez Fernandez, E. Andres Parra, Sergio Dominguez and Claudio Rossi, Design, Modeling and Control of a Spherical Autonomous Underwater Vehicle for Mine Exploration, 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Madrid, Spain, October 2018.
68. Alfredo Martins et al., UX 1 system design - A robotic system for underwater mining exploration, 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Madrid, Spain, October 2018.
67. Zorana Milosevic, Ramon Suarez, Sergio Dominguez, Claudio Rossi, UX-1 Guidance, Navigation and Meta-control Software, Robotics and Automation for mineral perspection and extraction, Bled, Sovenia, January 2018.
66. Julian Colorado, Claudio Rossi, Antonio Barrientos, A. Parra, C. Devia, D. Patino, The role of massive morphing wings for maneuvering a bio-inspired bat-like robot, ICRA 2018, May 21-25, 2018, Brisbane, Australia.
65. R. Saltaren, C. Rossi, Marine and Underwater Robotics at the CAR UPM-CSIC, International Conference on Marine Robotics in Ocean Exploration (MarineRobotics2017), October 9-11, 2017, Saint-Petersburg, Russia (invited talk)
64. Chao Zhang, Claudio Rossi and Erdal Kayacan, "Interval Type-2 Fuzzy-Neuro Control of Nonlinear Systems With Proved Overall System Stability", FUZZ-IEEE 2017, Naples, Italy, July 2017
63. Luis Lopes et al., "UNEXMIN H2020 Project: an underwater explorer for flooded mines", European Geosciences Union General Assembly, Vienna, Austria April 2017.
62. C. Zhang, C. Rossi, W. He, J. Colorado, "Virtual-work-based Optimization Design on Compliant Transmission Mechanism for Flapping-wing aerial Vehicles", International Conference on Manipulation, Automation and Robotics at Small Scales, Paris, France, July 2016.
61. A. Ravalli, C. Rossi, G. Marrazza, The bio-inspired artificial muscle based on chemical sensors, 26th Anniversary World Congress on Biosensors (Biosensors 2016), May 2016, Gothenburg, Sweden.
60. J. Lumbreras et al., The "Ingenia" Initiative: A multidisciplinary set of subjects for promoting the CDIO methodology in a Master's Degree in Industrial Engineering. Proceedings of the 11th International CDIO Conference,Chengdu, Sichuan, P.R. China, Volume: 1, 2015
59. C. Zhang, C. Rossi, D. Song, "Design and Fabrication of a Novel Morphing Wing Flapping MAVP", CCAC, 2nd IEEE Conference on Automatic Control, Bogota, Colombia, October 2015.
58. P. Gil, C. Rossi, W. Coral, "Biophilic evolutionary buildings that restore the experience of animality in the city", Living Machines 2015, the 4th International Conference on Biomimetic and Biohybrid Systems, Barcelona, Spain, July 2015.
57 W. Coral, C. Rossi, I. Perrino, "Bio-inspired Morphing Caudal Fin Using Shape Memory Alloy Composites for a Fish-like Robot", International Conference on Informatics in Control, Automation and Robotics, Colmar, France, July 2015.
56 A. Medina, et al., "FOXIRIS: Flipper-based Oil&Gas ATEX Intelligent Robotic System", Advanced Space Technologies in Robotics and Automation (ASTRA), Noordwijk, NL, may 2015.
55 C. Rossi, W. Coral, P. Gil, "Evolutionary Training of Robotised Architectural Elements", European Conference on the Applications of Evolutionary and bio-inspired Computation (EvoApplications, EVOSTAR2013 conference), Copenhagen, Denmark, April 2015.
54 C. Rossi, W. Coral "Robot Fishes Escape from Flatland", 2nd FitFish Workshop on the Physiology of Swimming in Fish, Barcelona, Spain, October 2014 (invited talk).
53. J. Colorado, C. Rossi, A. Barrientos, D. Parino, ''The influence of bat wings for producing efficient net body forces in bio-inspired flapping robots'', International Conference on Informatics in Control, Automation and Robotics, (ICINCO) Vienna, Austria, September 2014.
52. W. Coral, C. Rossi, ''Shape Memory Alloy-Based High Phase Order Motor'', International Conference on Informatics in Control, Automation and Robotics (ICINCO), Vienna, Austria, September 2014.
51. C.Rossi, D. Perez-Moneo Suarez, ''Evolutionary learning of basic functionalities for snake-like robots'', ROBOT 2013, Madrid, Spain, November 2013.
50. J. Colorado, C. Rossi, A. Barrientos, ''Learning from bats: the influence of the morphing-wings for producing efficient net body forces in bio-inspired air robots'', International Conference on Informatics in Control, Automation and Robotics (ICINCO) 2013, Reyjavik, Iceland, July 2013.
49. Damaso Perez-Moneo Suarez and Claudio Rossi, A comparison between different encoding strategies for snake-like robot controllers, 15th European Conference on the Applications of Evolutionary and bio-inspired Computation (EvoApplications, EVOSTAR2013 conference), Vienna, Austria, April 2013.
48. Erik Hernandez, Antonio Barrientos, Jaime del Cerro and Claudio Rossi, Multi-Robot System For Patrolling Task via Stochastic Fictitious Play, 4th International Conference on Agents and Artificial Intelligence (ICAART), Barcelona, Spain, February 2013.
47. Julian Colorado, Claudio Rossi, William Coral, Antonio Barrientos, SMA-driven modulation of highly articulated wings: insights on efficient flight inspired by bats. IEEE International Conference on Intelligent Robots and Systems (IROS), Algarve, Portugal, 2012 (Workshop on smart materials and alternative technologies for bio-inspired robots and systems)
46. E. Hernandez, Antonio Barrientos, J. del Cerro, C. Rossi, "Cooperative Multi-Robot System for Infrastructure Security Tasks", Research, 4th International Conference on Agents and Artificial Intelligence (ICAART), Vilamoura, Portugal, February 2012.
45. J. Valente, A. Barrientos, J. del Cerro, D. Sanz, and M. Garzon, C. Rossi, "Practical issues and improvements in farmland coverage with aerial vehicles", Research, Development and Education on Unmanned Aerial Systems (RED-UAS) Workshop, Seville, Spain, November 2011.
44. J. Valente, A. Barrientos, J. del Cerro, C. Rossi, D. Sanz, and M. Garzon ,"Planificacion de trayectorias bi-objetivo en robotica aerea para agricultura de precision", III Robotics Workshop, Sevilla, Spain, 2011.
43. J. Valente, A. Barrientos, J. del Cerro, C. Rossi, J. Colorado, D. Sanz, and M. Garzon, Multi-Robot Visual Coverage Path Planning: Geometrical Metamorphosis of the Workspace through Raster Graphics Based Approaches, Int.l Conference on Computational Science and Its Applications (ICCSA 2011), pp. 58.73, Lecture Notes in Computer Science, 2011, Volume 6784/2011, 58-73, 2011.
42. Claudio Rossi, William Coral, Julian Colorado, Antonio Barrientos, Towards Motor-less and Gear-less Robots: a bio-mimetic Fish Design. International Workshop on bio-inspired robots, Nantes, France, 2011.
41. Julian Colorado, Antonio Barrientos, and Claudio Rossi, Biomimetic of morphing wings in a Bat-robot: SMA-based Artificial Muscles. International Workshop on bio-inspired robots, Nantes, France, 2011.
40. Medina, A.; Garcia, A.; Rossi, C.; Barrientos, A.; Mollinedo, L., 3D Path Planning using a Fuzzy Logic Navigational Map for Planetary Surface Rovers, Advanced Space Technologies in Robotics and Automation (ASTRA), Noordwijk (NL), 2011.
39. D. Sanz, A. Barrientos, C. Rossi, J. Del Cerro, M.Garzón, J.R. Valente, Secondary Mission Planner Restricted to a Predefined Prior Missions, Advanced Space Technologies in Robotics and Automation (ASTRA), Noordwijk (NL), 2011.
38. Jose Baca, Claudio Rossi, Manuel Ferre, Rafael Aracil, Cooperative Task Execution between Modular Robots Based on Tight-Loose Cooperation Strategies, IEEE International Conference on Robotics and Automation, Shanghai, 2011.
37. Claudio Rossi, William Coral, Julian Colorado, Antonio Barrientos, A Motor-less and Gear-less Bio-mimetic Robotic Fish Design, IEEE International Conference on Robotics and Automation, Shanghai, 2011.
36. M Graziano, R Cadenas, A Medina, A Puiatti, M Mura, D Puccinelli, A Barrientos, C Rossi, D Sanz, JF Dufour, "Distributed Instruments in Preparation to Manned Missions to Mars and Moon", 61st International Astronautical Congress, 2010.
35. J. Colorado, A. Barrientos, C. Rossi, J. del Cerro, "Follow-the-leader Formation Marching Through a Scalable O(log2n) Parallel Architecture", International Conference on Intelligent Robots and Systems (IROS), 2010.
34. A.Medina, C.Negueruela. L.Mollinedo, A.Barrientos, C.Rossi, D. Sanz, A. Puiatti, J.F.Dufour, "Wireless sensor web for rover planetary exploration", International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Sapporo, Japan, 2010.
33. D. Sanz, M.Garzon, A.Barrientos, C.Rossi, A.Medina, A. Puiatti, "Robotic Deployment System For Space Exploration", International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Sapporo, Japan, 2010.
32. Julian Colorado, Antonio Barrientos, Claudio Rossi, Mario Garzon, María Galan, Jaime del Cerro "Efficient locomotion on non-wheeled snake-like robots", 7th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Madeira (PT), 2010.
31. C. Rossi, "Could robot fish be used for leading schools of fish?" (Invited talk), International Workshop on the Swimming Physiology of Fish, Universidad de Barcelona, 2010
(FitFish2010), Barcelona, 2010.
30. Claudio Rossi, William Coral, Antonio Barrientos, Julian Colorado, "Fish physiology put into Practice: a robotic fish model", Workshop on the Swimming Physiology of Fish (FitFish2010), Barcelona, 2010.
29. Claudio Rossi, William Coral, Antonio Barrientos, "SMA Control for Bio-mimetic Fish Locomotion", 7th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Madeira (PT), 2010.
28. Medina, A; De Negueruela, C.; Puiatti, A.; Puccinelli, D; Mura, M; Barrientos, A; Rossi, C; Sanz, D; Dufour, JF,
"Practical Implementation of a Wireless Sensor Network Instrument for Planetary Exploration "
Wireless Sensor Networks for Space Applications Workshop (WiSens4Space 2009), Santorini, Greece, 2009.
27. C. Rossi, L. Aldama, A. Barrientos,
"Negotiation of Target Points for Teams of Heterogeneous Robots: an Application to Exploration"
IEEE International Conference on Intelligent Robots and Systems (IROS), St. Luis, MO, USA, 2009.
26. C. Rossi, L. Aldama, A. Barrientos,
"Simultaneous Task Subdivision and Assignment for Teams of Heterogeneous Robots"
International Conference on Robotics and Automation (ICRA), Kobe, Japan, 2009.
25. Claudio Rossi, Leyre Aldama, Antonio Barrientos,
"Simultaneous Task Subdivision and Assignment in the FRACTAL Multi-robot System"
40th International Symposium on Robotics (ISR 2009), Barcelona, 2009.
24. Claudio Rossi, Antonio Barrientos,
"Seguimiento de optimos en movimiento a travez de predicciones basadas en filtros de Kalman" (in spanish)
VI Congreso Espanol sobre Metaheuristicas, Algoritmos Evolutivos y Bioinspirados, Malaga, 2009.
23. C. Rossi et al.,
"The Moon Hound Lunar Rover"
10th Workshop on Advanced Space Technologies for Robotics and Automation, special session on the ESA Lunar Robotics Challenge. ESA/ESTEC, Noordwijk, The Netherlands, 2008.
22. Alexander Martinez, Antonio Barrientos, Claudio Rossi, Pedro Gutierrez, Rodrigo San Martin, Jaime del Cerro,
"Modelling and Controller Design Methodology for Unmanned Vertical Take Off and Landing (UVTOL) Vehicles"
International Symposium on Robotics (ISR 2008), Seoul, Korea, 2008.
21. Martinez, A., Rossi, C., Gutierrez, P., Del Cerro, J., Barrientos, A., San Martin, R.,
"Modelling and controller prototyping for unmanned vertical take off and landing vehicles"
European Modeling and Simulation Symposium (EMSS), Briatico, Italy, 2008.
20. C. Rossi, A. Barrientos, J. del Cerro, P. Gutierrez, A. Martinez, R. San Martin
"Pose Estimation with Multiple Sources Using Evolutionary Algorithms"
IEEE International Symposium on Intelligent Signal Processing (WISP), 2007.
19. P. Gutierrez, J. del Cerro, A. Barrientos, R. San Martin, A. Martinez, C. Rossi,
"Planificacion de misiones de UAV mediante el Lenguaje de Control de Vehiculos Aereos" (in spanish)
in proc. of 2rd Workshop RoboCity2030, 2007.
18. C. Rossi, A. Barrientos, J. del Cerro,
"Two Adaptive Mutation Operators for Optima Tracking in Dynamic Optimization Problems with Evolution Strategies"
in Proc. Genetic and Evolutionary Computation Conference (GECCO 2007), London, 2007.
17. A. Barrientos, J. del Cerro, R. San Martin, P. Gutierrez, A. Martinez, C. Rossi,
"Control architecture of the VAMPIRA autonomous helicopter" (in Spanish)
in Proc. Workshop on Robot Control Architectures, Madrid, 2007.
16. Julio Cesar Diaz, Mohamed Abderrahim, Claudio Rossi,
"Automated Visual Inspection for Robotic On-Orbit Servicing"
MX2006 (Mechatronics Forum Biennial International Conference), Penn State Great Valley, PA, USA. 2006.
15. Claudio Rossi, Mohamed Abderrahim, Julio Cesar Diaz,
"Evolutionary Model-based Pose Estimation for Variable Configuration Objects",
ISPRA (Int. Conf. Signal Processing, Robotics and Automation), Madrid, Spain. 2006.
14. Claudio Rossi, Mohamed Abderrahim, Julio Cesar Diaz,
"EvoPose: A Model-based Pose Estimation Algorithm with Correspondences Determination"
IEEE ICMA (Int. Conf. on Mechatronics and Automation), Niagara Falls, Ontario, Canada. 2005.
13. J.C. Diaz, M. Abderrahim, C. Rossi,
"Satellite Relative Navigation based on Visual Feedback"
8th International symposium on Artificial Intelligence, Robotics and Automation in Space (SAIRAS), Munchen, Germany. 2005.
12. J.C. Diaz, M. Abderrahim, C. Rossi, M.A. Salichs,
"Experimental Simulation of Satellite Relative Navigation Using Computer Vision"
2nd International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 2005.
11. C. Rossi, M. Abderrahim, J.C. Diaz,
"An Evolutionary Algorithm for Model-based Object Pose Estimation and Tracking"
IEE International Conference on Visual Information Engineering, Glasgow, UK, 2005.
10. A. Carrascal, D. Manrique, J. Rios, and C. Rossi,
"BioCAM: Biological Model for Constructing Artificial Neural Networks through Cellular Automata",
in proceedings of Artificial Intelligence and Applications (AIA), 2003.
9. A. Carrascal, D. Manrique, Perez, J. Rios, and C. Rossi,
"Growing Axons Evolving L-Systems"
in proceedings of Artificial Intelligence and Applications (AIA), 2003.
8. A. Carrascal, D. Manrique, C. Rossi,
"Genetic Learning of Fuzzy Rules Through Neuro-Fuzzy Topology Construction"
in proceedings of Knowledge-based intelligent information engineering systems & allied technologies (KES), 2002.
7. A. Carrascal, D. Manrique, C. Rossi,
"Improving Learning Classifier Systems by a Bit-Flip based Local Search"
in Proceedings of IASTED Conference on Artificial Intelligence and Applications, 2002.
6. M. Pelillo, C. Rossi,
"Payoff-monotonic Game Dynamics and the Maximum Clique Problem"
in Proceedings of WIRN 2001 (XI Italian Workshop on Neural Nets), Vietri sul Mare (SA), Italy, 2001.
5. C. Rossi,
"A Replicator Equations based Evolutionary Algorithm for the Maximum Clique Problem",
Congress on Evolutionary Computation (CEC2000), San Diego, CA, USA, 2000.
4. C. Rossi, E.Marchiori, J.N.Kok,
"An Adaptive Evolutionary Algorithm for the Satisfiability Problem",
2000 ACM Symposium on Applied Computing (SAC2000), 2000,Como, Italy, 2000.
3. E. Marchiori, C. Rossi,
"A Flipping Genetic Algorithm for Hard 3-SAT Problems"
Genetic and Evolutionary Computation Conference (GECCO), Orlando, Florida, 1999.
2. J.N. Kok, E. Marchiori, M. Marchiori, C. Rossi,
"Constraining of Weights using Regularities"
European Symposium on Artificial Neural Networks (ESANN), Brugge, Belgium, 1996.
1. J.N. Kok, E. Marchiori, M. Marchiori, C. Rossi,
"Evolutionary Training of CLP-Constrained Neural Networks"
Practical Aspects of Constraint Technology (PACT), London, UK, 1996. (Abstract)
Miscellanea
1. C.Rossi,
"Nature-Inspired Search Techniques for Hard Optimization Problems", (Ph.D. Thesis)
Technical Report UBLCS 2001-03, University of Bologna, Italy, 2001.
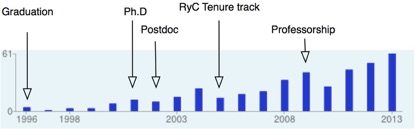
A graphical footnote
So this is the plot of the citations to my publications as of november 2013 according to google scholar. It is funny how you can spot a direct correlation between the change of job and productivity...
Last Update: March 2026